一种地铁站机器人巡检系统及巡检方法发明专利
 专利申请类型:发明专利;
专利申请类型:发明专利;
源自:天津高价值专利检索信息库;
专利名称:一种地铁站机器人巡检系统及巡检方法
专利类型:发明专利
专利申请号:CN202410674663.5
专利申请(专利权)人:天津地铁智慧科技有限公司
权利人地址:天津市南开区南京路309号-805
专利发明(设计)人:李守勤,于广淼,吴自强,张倩,薛献磊,褚玉振
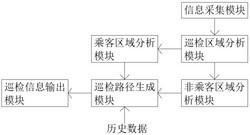
专利摘要:本发明公开了一种地铁站机器人巡检系统及巡检方法,包括信息采集模块、乘客区域分析模块、非乘客区域分析模块、巡检路径生成模块,本发明涉及机器人巡检技术领域,解决了没有结合实际进行综合规划,对整体的巡检造成巡检不到位,存在巡检效率低的技术,本发明通过对地铁站进行不同区域划分,针对不同的区域采取不同的巡检方式,同时在生成巡检路径的同时根据区域对应的区域特征来综合评价,其中区域特征包括多个方面,进一步的会结合历史数据来综合生成,通过对多方数据的分析整合来生成路径,一方面能够贴合实际需求,从而达到最佳的巡检效果,另一方面对数据进行综合分析能够提高数据的利用率,实现更加精准的巡检路径生成。
主权利要求:
1.一种地铁站机器人巡检系统,其特征在于,包括:
信息采集模块,用于将地铁站平面图信息传输到巡检区域分析模块;
巡检区域分析模块,用于根据地铁站平面图信息对地铁站区域进行划分得到乘车区域和设备区域,并生成乘车区域信息和设备区域信息,同时将设备区域信息传输到非乘客区域分析模块,将乘车区域信息传输到乘客区域分析模块;
非乘客区域分析模块,用于对设备区域信息对应的设备区域进行分析,通过结合区域图像来对设备区域进行异常判断,并生成巡检分析信息或异常信息,同时将巡检分析信息传输到巡检路径生成模块,将异常信息传输到巡检信息输出模块;
乘客区域分析模块,用于根据是否存在障碍物对乘车区域进行有障区域和无障区域划分,并生成待处理路径,同时根据障碍物是否对待处理路径存在影响生成二次分析信息或巡检路径信息,接着将二次分析信息传输到巡检路径生成模块;
巡检路径生成模块,用于对巡检分析信息和二次分析信息进行分析,针对巡检分析信息通过对设备区域的权重值进行计算排序生成巡检路径信息,针对二次分析信息,通过对有障区域流动量进行分析生成巡检路径信息,流动量表示为该区域在时间周期t内所有的人员走动量,并将巡检路径信息传输到巡检信息输出模块,且巡检路径生成模块对巡检分析信息的具体分析方式如下:A1:获取到历史数据中分析对象对应巡检项目的巡检时长,获取到分析对象的巡检项目n,并将巡检时长记作Xn,接着根据公式 计算得到分析对象的理论巡检时长记作Xo,且X1为预设时长,具体数值由操作人员设定;
A2:并根据分析对象内巡检项目的巡检时长Xn从小到大进行巡检并生成巡检路径,接着计算设备区域i所有巡检项目的巡检时长均值记作Xip,同时获取到设备区域i的巡检项目数量Li,并将数据代入公式 计算得到设备区域i的权重值Pi,同时按照权重值Pi从小到大进行巡检并生成巡检路径信息,且Xi为设备区域i对应的巡检时长,a1为预设比例系数,且a1取值为1.41。
2.根据权利要求1所述的一种地铁站机器人巡检系统,其特征在于,所述非乘客区域分析模块对设备区域信息进行分析的具体方式为:S1:将设备区域信息中对应的设备区域进行标号记作i,且i=1、2、…、j,同时获取到设备区域i对应的巡检项目数量记作Li和巡检时间Ti,将二者代入公式 计算得到设备区域i对应的区域值Fi,其中e1为预先设置的计算系数,并将设备区域i按照区域值Fi从小到大排序;
S2:获取区域值Fi最小的设备区域并记作分析对象,并获取到分析对象中的巡检项目记作n,且n=1、2、…、m,同时获取到分析对象对应的区域图像,并对区域图像进行识别得到识别信息,接着根据识别信息对分析对象进行异常判断,当分析对象存在异常时,则对出现异常的位置进行定位,并生成异常信息,反之当分析对象不存在异常时,则进行巡检路径规划,并生成巡检分析信息。
3.根据权利要求1所述的一种地铁站机器人巡检系统,其特征在于,所述乘客区域分析模块对乘车区域信息分析的具体方式为:获取到乘车区域并进行标号记作k,且k=1、2、…、h,同时获取到乘车区域k的图像信息,并判断对应乘车区域是否存在障碍物,接着根据障碍物情况将乘车区域k分类为无障区域k1和有障区域k2。
4.根据权利要求3所述的一种地铁站机器人巡检系统,其特征在于,对有障区域分析的具体方式为:
对有障区域k2建立空间坐标系,并对其对应的障碍物进行坐标点描绘,同时确定机器人的巡检起点和巡检终点,接着生成距离最短的待处理路径,若障碍物对待处理路径不造成影响,则直接生成巡检路径信息,并将巡检路径信息传输到巡检信息输出模块,反之若障碍物对待处理路径造成影响,则生成二次分析信息。
5.根据权利要求4所述的一种地铁站机器人巡检系统,其特征在于,所述巡检路径生成模块对二次分析信息的具体分析方式为:获取到所有的有障区域k2,同时获取到有障区域k2对应的流动量记作Rk2,接着将流动量Rk2与预设值Ry进行比较,当流动量Rk2大于预设值Ry时,则将对应的有障区域分类为高流有障区域,反之当流动量Rk2小于预设值Ry时,则将对应的有障区域分类为低流有障区域。
6.根据权利要求5所述的一种地铁站机器人巡检系统,其特征在于,巡检路径生成模块对高流有障区域分析的方式为:获取到高流有障区域对应的障碍物坐标,并生成绕行信息,且具体的绕行信息表示为以障碍物为圆心,半径为D的区域进行绕行,进一步的生成巡检路径信息,同时将巡检路径信息传输到巡检信息输出模块。
7.根据权利要求5所述的一种地铁站机器人巡检系统,其特征在于,巡检路径生成模块对低流有障区域分析的方式为:获取到低流有障区域对应的障碍物坐标,同时以障碍物为圆心,获取半径为D的区域记作绕行区域,并对绕行区域两个方向的流动量进行比较,接着选取流动量最小对应的绕行区域方向,并生成巡检路径信息。
8.一种地铁站机器人巡检方法,该方法应用于权利要求1‑7任一项所述的一种地铁站机器人巡检系统内,其特征在于,该方法具体包括以下步骤:步骤一:根据地铁站平面图信息将地铁站进行乘车区域和设备区域的划分;
步骤二:针对设备区域,根据设备区域对应的巡检项目的巡检参数来计算设备区域的权重值,并按照权重值从小到大生成巡检路径信息;
步骤三:针对乘车区域,通过对障碍物进行分析将乘车区域进行分类,并根据有障区域内障碍物的位置生成巡检路径信息和二次分析信息;
步骤四:对二次分析信息进行分析,通过对流动量进行分析,并根据障碍物的位置生成巡检路径信息。 说明书 : 一种地铁站机器人巡检系统及巡检方法技术领域[0001] 本发明涉及机器人巡检技术领域,具体为一种地铁站机器人巡检系统及巡检方法。背景技术[0002] 地铁站机器人巡检系统是一种应用于地铁车站的自动化检测技术,它通过智能机器人执行日常的巡检工作,以提高安全性和效率。[0003] 根据申请号为CN201711165982.X的专利显示,巡检机器人的一具体实施方式包括:驱动装置,用于驱使巡检机器人沿预设路径移动;图像采集设备和声音采集设备,均安装在升降云台上,分别用于采集图像信息和音频信息;传感器组件,用于采集巡检机器人的周围环境信息;控制装置,用于根据图像采集设备、声音采集设备和传感器组件采集的信息控制巡检机器人;供电装置,用于向巡检机器人供电。[0004] 上述技术方案通过控制装置对驱动装置进行控制,可以是驱动装置驱使巡检机器人沿预设路径移动。同时,通过图像采集设备、声音采集设备和传感器组件,可以分别采集图像信息、音频信息以及巡检机器人的周围环境信息等。这样,控制装置可以根据所采集的信息进一步控制巡检机器人。此外,通过设置供电装置可以向巡检机器人的各用电部件供电,从而使巡检机器人可以代替人工进行数据中心的日常巡检工作。这样,可以降低人工劳动强度和人工成本。[0005] 但是部分现有的地铁站机器人巡检系统,在控制机器人进行巡检的时候,通常是通过对路径进行规划来实现巡检的目的,但是在对路径进行规划的时候,没有考虑到实际产生的问题,比如在巡检的时候存在的障碍物、如何根据人流量进行合理的路径规划,还有就是不同区域的巡检时长和巡检路径等等,针对上述一系列的问题,没有综合数据进行合理的规划,从而会导致后续在利用机器人进行巡检的时候,存在巡检不到位,巡检效率低的问题。发明内容[0006] 针对现有技术的不足,本发明提供了一种地铁站机器人巡检系统及巡检方法,解决了没有结合实际进行综合规划,对整体的巡检造成巡检不到位,存在巡检效率低的问题。[0007] 为实现以上目的,本发明通过以下技术方案予以实现:一种地铁站机器人巡检系统,包括:[0008] 信息采集模块,用于将地铁站平面图信息传输到巡检区域分析模块;[0009] 巡检区域分析模块,用于根据地铁站平面图信息对地铁站区域进行划分得到乘车区域和设备区域,并生成乘车区域信息和设备区域信息,同时将设备区域信息传输到非乘客区域分析模块,将乘车区域信息传输到乘客区域分析模块;[0010] 非乘客区域分析模块,用于对设备区域信息对应的设备区域进行分析,通过结合区域图像来对设备区域进行异常判断,并生成巡检分析信息或异常信息,同时将巡检分析信息传输到巡检路径生成模块,将异常信息传输到巡检信息输出模块;[0011] 乘客区域分析模块,用于根据是否存在障碍物对乘车区域进行有障区域和无障区域划分,并生成待处理路径,同时根据障碍物是否对待处理路径存在影响生成二次分析信息或巡检路径信息,接着将二次分析信息传输到巡检路径生成模块;[0012] 巡检路径生成模块,用于对巡检分析信息和二次分析信息进行分析,针对巡检分析信息通过对设备区域的权重值进行计算排序生成巡检路径信息,针对二次分析信息,通过对有障区域流动量进行分析生成巡检路径信息,并将巡检路径信息传输到巡检信息输出模块。[0013] 作为本发明的进一步方案:所述非乘客区域分析模块对设备区域信息进行分析的具体方式为:[0014] S1:将设备区域信息中对应的设备区域进行标号记作i,且i=1、2、…、j,同时获取到设备区域i对应的巡检项目数量记作Li和巡检时间Ti,将二者代入公式 计算得到设备区域i对应的区域值Fi,其中e1为预先设置的计算系数,并将设备区域i按照区域值Fi从小到大排序;[0015] S2:获取区域值Fi最小的设备区域并记作分析对象,并获取到分析对象中的巡检项目记作n,且n=1、2、…、m,同时获取到分析对象对应的区域图像,并对区域图像进行识别得到识别信息,接着根据识别信息对分析对象进行异常判断,当分析对象存在异常时,则对出现异常的位置进行定位,并生成异常信息,反之当分析对象不存在异常时,则进行巡检路径规划,并生成巡检分析信息。[0016] 且对巡检分析信息的具体分析方式如下:[0017] A1:获取到历史数据中分析对象对应巡检项目的巡检时长,获取到分析对象的巡检项目n,并将巡检时长记作Xn,接着根据公式 计算得到分析对象的理论巡检时长记作Xo,且X1为预设时长,具体数值由操作人员设定;[0018] A2:并根据分析对象内巡检项目的巡检时长Xn从小到大进行巡检并生成巡检路径,接着计算设备区域i所有巡检项目的巡检时长均值记作Xip,同时获取到设备区域i的巡检项目数量Li,并将数据代入公式 计算得到设备区域i的权重值Pi,同时按照权重值Pi从小到大进行巡检并生成巡检路径信息,且Xi为设备区域i对应的巡检时长,a1为预设比例系数,且a1取值为1.41。[0019] 作为本发明的进一步方案:所述乘客区域分析模块对乘车区域信息分析的具体方式为:[0020] 获取到乘车区域并进行标号记作k,且k=1、2、…、h,同时获取到乘车区域k的图像信息,并判断对应乘车区域是否存在障碍物,接着根据障碍物情况将乘车区域k分类为无障区域k1和有障区域k2。[0021] 且对有障区域分析的具体方式为:[0022] 对有障区域k2建立空间坐标系,并对其对应的障碍物进行坐标点描绘,同时确定机器人的巡检起点和巡检终点,接着生成距离最短的待处理路径,若障碍物对待处理路径不造成影响,则直接生成巡检路径信息,并将巡检路径信息传输到巡检信息输出模块,反之若障碍物对待处理路径造成影响,则生成二次分析信息。[0023] 作为本发明的进一步方案:所述巡检路径生成模块对二次分析信息的具体分析方式为:[0024] 获取到所有的有障区域k2,同时获取到有障区域k2对应的流动量记作Rk2,接着将流动量Rk2与预设值Ry进行比较,当流动量Rk2大于预设值Ry时,则将对应的有障区域分类为高流有障区域,反之当流动量Rk2小于预设值Ry时,则将对应的有障区域分类为低流有障区域。[0025] 且对高流有障区域分析的方式为:[0026] 获取到高流有障区域对应的障碍物坐标,并生成绕行信息,且具体的绕行信息表示为以障碍物为圆心,半径为D的区域进行绕行,进一步的生成巡检路径信息,同时将巡检路径信息传输到巡检信息输出模块。[0027] 低流有障区域分析的方式为:[0028] 获取到低流有障区域对应的障碍物坐标,同时以障碍物为圆心,获取半径为D的区域记作绕行区域,并对绕行区域两个方向的流动量进行比较,接着选取流动量最小对应的绕行区域方向,并生成巡检路径信息。[0029] 作为本发明的进一步方案:一种地铁站机器人巡检方法,该方法具体包括以下步骤:[0030] 步骤一:根据地铁站平面图信息将地铁站进行乘车区域和设备区域的化分;[0031] 步骤二:针对设备区域,根据设备区域对应的巡检项目的巡检参数来计算设备区域的权重值,并按照权重值从小到大生成巡检路径信息;[0032] 步骤三:针对乘车区域,通过对障碍物进行分析将乘车区域进行分类,并根据有障区域内障碍物的位置生成巡检路径信息和二次分析信息;[0033] 步骤四:其次对二次分析信息进行分析,通过对流动量进行分析,并根据障碍物的位置生成巡检路径信息。[0034] 本发明提供了一种地铁站机器人巡检系统及巡检方法。与现有技术相比具备以下有益效果:[0035] 本发明通过对地铁站进行不同区域划分,针对不同的区域采取不同的巡检方式,同时在生成巡检路径的同时根据区域对应的区域特征来综合评价,其中区域特征包括多个方面,进一步的会结合历史数据来综合生成,通过对多方数据的分析整合来生成路径,一方面能够贴合实际需求,从而达到最佳的巡检效果,另一方面对数据进行综合分析能够提高数据的利用率,实现更加精准的巡检路径生成。附图说明[0036] 图1为本发明系统原理图;[0037] 图2为本发明方法流程图;[0038] 图3为本发明障碍物绕行示意图。具体实施方式[0039] 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。[0040] 请参阅图1,本申请提供了一种地铁站机器人巡检系统,包括:信息采集模块、巡检区域分析模块、乘客区域分析模块、非乘客区域分析模块、巡检路径生成模块、巡检信息输出模块。[0041] 作为本发明的实施例一[0042] 信息采集模块,用于获取地铁站的平面图信息,同时将平面图信息传输到巡检区域分析模块,且平面图信息表示为乘车区域对应的平面结构信息,主要体现为不同位置对应的基础设施。[0043] 巡检区域分析模块,用于对获取的平面图信息进行分析,并根据获取的平面图信息将地铁站进行区域分类,且具体分类为乘车区域和设备区域,而乘车区域则表示为乘客候车对应区域,而设备区域则表示为地铁站一些设备对应的放置区域,比如配电室、指挥室、监控室等等,同时生成乘车区域信息和设备区域信息,接着将乘车区域信息传输到乘客区域分析模块,将设备区域信息传输到非乘客区域分析模块。[0044] 非乘客区域分析模块,用于对获取的设备区域信息进行分析,且对设备区域信息分析的具体方式为:[0045] 将设备区域信息中对应的设备区域进行标号记作i,且i=1、2、…、j,同时获取到设备区域i对应的巡检项目数量记作Li和巡检时间Ti,且此处的巡检时间表示为单次巡检时间间隔,接着将二者代入公式 计算得到设备区域i对应的区域值Fi,其中e1为预先设置的计算系数,并将设备区域i按照区域值Fi从小到大排序;[0046] 接着获取区域值Fi最小的设备区域并记作分析对象,并获取到分析对象中的巡检项目记作n,且n=1、2、…、m,同时获取到分析对象对应的区域图像,且此处的区域图像是通过设置在不同位置的摄像头获取的,并对区域图像进行识别得到识别信息,接着根据识别信息对分析对象进行异常判断,当分析对象存在异常时,则对出现异常的位置进行定位,并生成异常信息,反之当分析对象不存在异常时,则进行巡检路径规划,并生成巡检分析信息,同时将巡检分析信息传输到巡检路径生成模块,以此类推对所有的设备区域进行分析得到巡检分析信息。[0047] 结合实际分析,针对设备区域的异常判断,通过对获取到的图像内容进行识别,同时结合对应设备区域的参数来进行综合分析,例如在配电室,可能存在电压、电流不稳定的情况,针对这样的不稳定情况则通过数据来进行反应,进一步的根据图像来确定具体位置。[0048] 巡检路径生成模块,用于对获取的巡检分析信息进行分析,并结合获取的历史数据来进行路径规划,且具体的路径规划方式如下:[0049] 获取到历史数据中分析对象对应巡检项目的巡检时长,且此处的巡检时长为不同巡检人员在时间周期内对同一种巡检项目的巡检时长均值,获取到分析对象的巡检项目n,并将巡检时长记作Xn,接着根据公式 计算得到分析对象的理论巡检时长记作Xo,且X1为预设时长,具体数值由操作人员设定,以此类推计算得到设备区域i对应的巡检时长Xi;[0050] 并根据分析对象内巡检项目的巡检时长Xn从小到大进行巡检并生成巡检路径,接着计算设备区域i所有巡检项目的巡检时长均值记作Xip,同时获取到设备区域i的巡检项目数量Li,并将数据代入公式 计算得到设备区域i的权重值Pi,同时按照权重值Pi从小到大进行巡检并生成巡检路径信息,且Xi为设备区域i对应的巡检时长,a1为预设比例系数,且a1取值为1.41,同时巡检路径信息传输到巡检信息输出模块。[0051] 结合实际说明,一般来说在对设备进行巡检的时候通常会节省整体的时间,因此在巡检的时候会从巡检用时最小的区域进行巡检,对于巡检用时最小的区域包括以下特点:巡检项目少,对于巡检项目少的区域,对于巡检花费的时间则会相应的减少,巡检项目简单,而对于巡检项目复杂的情况,则需要花费大量的时间进行巡检,从而确保整体的安全性。[0052] 巡检信息输出模块,用于将巡检路径信息传输给对应的巡检机器人,巡检机器人在接收到信息后,系统会对其进行控制,从而发出巡检指令,根据巡检指令进行相应的巡检工作。[0053] 结合实际分析,针对巡检机器人的巡检代码组成主要包括以下部分:[0054] 路径规划:根据给定的目标点和环境信息,生成一条可行的路径。常用的路径规划算法包括A*算法、Dijkstra算法等。[0055] 避障:检测并避开环境中的障碍物,确保机器人能够安全地通过。这可能涉及到传感器数据的处理和障碍物识别算法。[0056] 定位与地图构建:利用传感器数据和已知的环境信息,对机器人进行定位,并构建环境的地图。常用的定位算法包括SLAM(SimultaneousLocalizationandMapping)算法。[0057] 运动控制:根据导航算法的结果,控制机器人的运动,如前进、后退、转向等。这可能涉及到电机控制和速度调节等技术。[0058] 异常处理:在遇到导航过程中的异常情况时,采取相应的措施,如重新规划路径、调整速度等。一般来说,可以使用C++、Python等编程语言来编写导航算法的代码。此外,还可以利用现有的开源库和工具,如ROS(RobotOperatingSystem)等。[0059] 例如:以下是一个使用Python编写的简单示例,用于演示路径规划的基本概念:[0060] ```python[0061] importnumpyasnp[0062] fromscipy.spatialimportdistance_matrix[0063] #定义地图中的障碍物位置[0064] obstacles=[(2,2),(3,3),(4,4)][0065] #定义起点和终点[0066] start=(0,0)[0067] goal=(5,5)[0068] #计算距离矩阵[0069] dist_matrix=distance_matrix(obstacles+[start,goal],obstacles+[start,goal])[0070] #使用A*算法进行路径规划[0071] defastar(start,goal,dist_matrix):[0072] open_list=[start][0073] closed_list=[][0074] g_score={start:0}[0075] f_score={start:dist_matrix[start][goal]}[0076] whileopen_list:[0077] current=min(open_list,key=lambdax:f_score[x])[0078] ifcurrent==goal:[0079] path=[current][0080] whilecurrenting_score:[0081] current=g_score[current][0082] path.append(current)[0083] returnpath[::‑1][0084] open_list.remove(current)[0085] closed_list.append(current)[0086] forneighborinrange(len(dist_matrix)):[0087] ifneighbornotinclosed_listandneighbornotinobstacles:[0088] tentative_g_score=g_score[current]+dist_matrix[current][neighbor][0089] ifneighbornotinopen_listortentative_g_score<g_score[neighbor]:[0090] g_score[neighbor]=tentative_g_score[0091] f_score[neighbor]=tentative_g_score+dist_matrix[neighbor][goal][0092] open_list.append(neighbor)[0093] returnNone[0094] #执行路径规划[0095] path=astar(start,goal,dist_matrix)[0096] print("Path:",path)[0097] 且上述代码只是一个简化的示例,实际应用中可能需要更复杂的算法和数据结构来处理更复杂的环境和任务。[0098] 作为本发明的实施例二,本实施例在实施例一的基础上实施,且与实施例一的区别之处在于,乘客区域分析模块对获取的乘车区域信息进行分析,且具体的分析方式如下:[0099] 获取到乘车区域并进行标号记作k,且k=1、2、…、h,且此处对乘车区域进行标号是按照平面图中上北下南的顺序按照地铁进站为起点进行标号,同时获取到乘车区域k的图像信息,并判断对应乘车区域是否存在障碍物,接着根据障碍物情况将乘车区域k分类为无障区域k1和有障区域k2;[0100] 针对有障区域k2建立空间坐标系,并对其对应的障碍物进行坐标点描绘,同时确定机器人的巡检起点和巡检终点,接着生成距离最短的待处理路径,具体的,此处生成的待处理路径表示为将无障区域和有障区域进行结合生成,并判断障碍物与待处理路径之间的关系,若障碍物对待处理路径不造成影响,则直接生成巡检路径信息,并将巡检路径信息传输到巡检信息输出模块,反之若障碍物对待处理路径造成影响,则生成二次分析信息,而针对生成的二次分析信息则将其传输到巡检路径生成模块。[0101] 巡检路径生成模块,用于对二次分析信息进行分析,通过对乘车区域的流动量进行分析来生成巡检路径信息,且具体的分析方式如下:[0102] 获取到所有的有障区域k2,同时获取到有障区域k2对应的流动量记作Rk2,具体的流动量表示为该区域在时间周期t内所有的人员走动量,且时间周期t的数值由操作人员设定,接着将流动量Rk2与预设值Ry进行比较,当流动量Rk2大于预设值Ry时,则将对应的有障区域分类为高流有障区域,反之当流动量Rk2小于预设值Ry时,则将对应的有障区域分类为低流有障区域,且分别对分类得到的区域进行分析;[0103] 针对高流有障区域的分析方式如下:[0104] 获取到高流有障区域对应的障碍物坐标,并生成绕行信息,且具体的绕行信息表示为以障碍物为圆心,半径为D的区域进行绕行,进一步的生成巡检路径信息,同时将巡检路径信息传输到巡检信息输出模块。[0105] 针对低流有障区域的分析方式如下:[0106] 获取到低流有障区域对应的障碍物坐标,同时以障碍物为圆心,获取半径为D的区域记作绕行区域,并对绕行区域两个方向的流动量进行比较,此处的两个方向是以当前前进的路径来说,结合附图3说明,接着选取流动量最小对应的绕行区域方向,并生成巡检路径信息,同时将其传输到巡检信息输出模块。[0107] 作为本发明的实施例三,重点在于将实施例一和实施例二的实施过程结合实施。[0108] 请参阅图2,一种地铁站机器人巡检方法,该方法具体包括以下步骤:[0109] 步骤一:根据地铁站平面图信息将地铁站进行乘车区域和设备区域的化分;[0110] 步骤二:针对设备区域,根据设备区域对应的巡检项目的巡检参数来计算设备区域的权重值,并按照权重值从小到大生成巡检路径信息;[0111] 步骤三:针对乘车区域,通过对障碍物进行分析将乘车区域进行分类,并根据有障区域内障碍物的位置生成巡检路径信息和二次分析信息;[0112] 步骤四:其次对二次分析信息进行分析,通过对流动量进行分析,并根据障碍物的位置生成巡检路径信息。[0113] 上述公式中的部分数据均是去其纲量进行数值计算,同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。[0114] 以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
专利地区:天津
专利申请日期:2024-05-29
专利公开日期:2024-08-20
专利公告号:CN118274845B
以上信息来自国家知识产权局,如信息有误请联系我方更正!
该专利所有权非本平台所有,我方无法提供专利权所有者联系方式,请勿联系我方。
网址:一种地铁站机器人巡检系统及巡检方法发明专利 http://www.mxgxt.com/news/view/1128599
相关内容
无人机自主巡检电网科达自控(831832)取得2项发明专利证书 进一步提升在综采工作面智能化控制系统及矿山特种机器人领域的竞争力
电视剧《巡回检察组》中谁是反派 人物关系是怎样的
NIST随机性检测方法及应用
E物业云平台、物业通管理系统、西安亘和软件、物业收费软件、物业客服巡检系统
STAR伺服驱动器维修检测九大方法
2024林宥嘉巡回演唱会西安站(时间+地点+门票)
食物过地铁安检机安全吗?专家:食品照X光不会有残留
专利检索
辽宁抚顺:开展“社区矫正交付执行”专门巡回检察 监督纠正52例考验期计算错误等问题
随便看看
最新实时动态
- 外资券商优化员工布局 各展其长加码中国市场
- 华策影视与俄罗斯CTC传媒、NMG签署战略合作协议
- 医药行业周报:慢性心衰大品种JK07潜力,继续重点推荐信立泰
- 统计局:2023年1
- 郑州市中小企业协会中心工作会议在郑州召开
- 合伙做生意,怎么分成?
- Verystar费芮荣获腾讯游戏人生平台2023年度“最佳营销服务商”奖项
- 75位艺人注销200家公司?上海、北京居多,近三年集中注销
- 医药行业跨境合作消息近期频出,港股创新药ETF(159567)涨超2%,开拓药业
- 大众交通(600611)
热点实时动态
- 11768
- 7363
- 7174
- 7011
- 6980
- 6689
- 6254
- 6076
- 6076
- 6055
